
Główne projekty
Wideo Kurs Całki Nieoznaczonej:
Projekty zakończone bądź zamknięte
Praca Magisterska z Matematyki
„Kwaterniony i ich zastosowanie w wizualizacji komputerowej.”
Plakat pracy:

Praca Magisterska z Automatyki i Robotyki
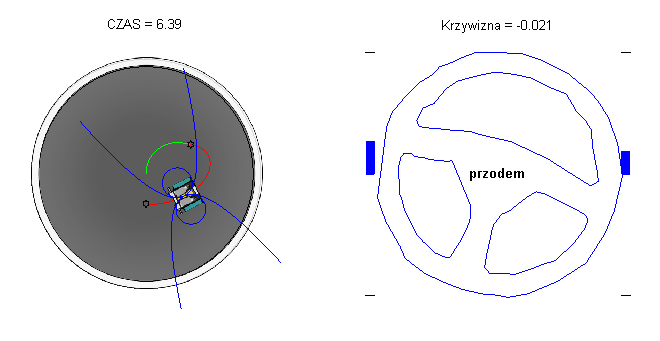
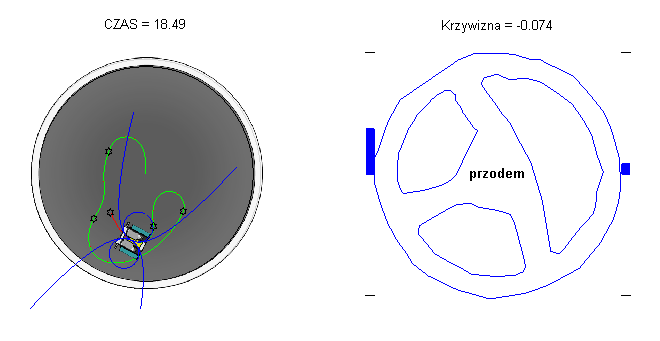
„Symulator kołowego robota mobilnego, do testowania algorytmów sterowania”
Praca Inżynierska
„Projekt i budowa platformy napędowej robota z możliwością sterowania jego prędkością i położeniem w zależności od lokalizacji robota w ringu.”
Zespół: Mateusz Kowalski i Mirosław Piotrowski
(Robot kategorii Standard Sumo) Efekt przedstawiony poniżej
rozważania wstępne

zakończone prace mechaniczne

sposób wykonanego naciągu

Testowanie modułu określającego położenie i orientacje.

Testowanie elektroniki

Pobieranie danych z czujników i ich wizualizacja + test sterowania.
Projekt Grupowy:
„Analiza wykorzystania czujników MEMS w robocie mobilnym.”
Skład zespołu: Mateusz Kowalski, Mirosław Piotrowski i Adam Żemetro



Koło Skalp :
– Działalność aktywnie w kole naukowym automatyków SKALP

Współorganizator Trójmiejskiego Turnieju Robotów Gdańsk 27-28 maja 2011
