
Jakie pH ma woda zmieszana z wód o pH=5 i pH=9
Macierz Obrotu Wokół Dowolnej Osi o Dowolny Kąt w Przestrzeni 3D

Dany jest punkt  o współrzędnych
o współrzędnych  . Wykonujemy obrót tego punktu wokół dowolnej osi zorientowanej tak jak wektor
. Wykonujemy obrót tego punktu wokół dowolnej osi zorientowanej tak jak wektor ![\vec{n}=[a,b,c]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-5268c6b59cc5f213d58ba1335062bcc7_l3.png "Rendered by QuickLaTeX.com") . Wektor ten jest wektorem jednostkowym, tzn
. Wektor ten jest wektorem jednostkowym, tzn  . Oś obrotu przechodzi przez początek układu współrzędnych. Obrót wykonamy o kąt skierowany
. Oś obrotu przechodzi przez początek układu współrzędnych. Obrót wykonamy o kąt skierowany  . Aby dokonać takiego obrotu trzeba wykonać następujące mnożenie.
. Aby dokonać takiego obrotu trzeba wykonać następujące mnożenie.
![\[\mathbf{P}^{\prime} = \mathbf{M} \cdot \mathbf{P},\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-5cfba24b54a4baa2c13aeaa895ae96f4_l3.png "Rendered by QuickLaTeX.com")
gdzie punkt zapiszemy na potrzeby rachunku macierzowego w postaci takiej  , wektor
, wektor  zapiszemy podobnie jako
zapiszemy podobnie jako  . Natomiast macierz
. Natomiast macierz  ma następującą postać.
ma następującą postać.
![\[\mathbf{M} = \begin{bmatrix} a^2(1-\cos \varphi) + \cos \varphi & ab(1-\cos \varphi) - c\sin \varphi & ac(1-\cos \varphi) + b\sin \varphi \\ ab(1-\cos \varphi) + c\sin \varphi & b^2(1-\cos \varphi) + \cos \varphi & bc(1-\cos \varphi) - a\sin \varphi \\ ac(1-\cos \varphi) - b\sin \varphi & bc(1-\cos \varphi) + a\sin \varphi & c^2(1-\cos \varphi) + \cos \varphi\end{bmatrix}\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-9e0c48f6f2a18dfc61171be3d0dea086_l3.png "Rendered by QuickLaTeX.com")
Można to także zapisać skrótowo.
![\[\mathbf{M} = \mathbf{n} \mathbf{n}^T(1-\cos \varphi) + \mathbf{I}\cos \varphi +\begin{bmatrix} 0 & -c & b \\ c & 0 & -a \\ -b & a & 0 \end{bmatrix}\sin \varphi\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-27ed306da5eca1c0814187193a53ae89_l3.png "Rendered by QuickLaTeX.com")
Obejrzyj w wersji wideo poniżej.
Continue reading
Wyrażenie Algebraiczne i Jednomian
Wyrażenie algebraiczne to pewna konfiguracja stałych i zmiennych połączonych przez działania takie jak dodawanie, odejmowanie, mnożenie, dzielenie, ale również potęgowanie i pierwiastkowanie.
![\[+ \qquad - \qquad \cdot \qquad : \qquad ^{\square} \qquad \sqrt[\square]{\quad}\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-4af1d08a983a7bd4f34e71cef7d113b2_l3.png "Rendered by QuickLaTeX.com")
Do tego dochodzą jeszcze nawiasy pozwalające na zmianę kolejności działań. Co ważne to, aby to wyrażenie miało sens i było skończone.
Przykłady
![\[3x, \quad x, \quad 4x^2, \quad -7,31\sqrt{x}-x^8, \quad \frac{x}{x+\sqrt[3]{x}}, \quad x^e, \quad x^{\frac{1}{\pi}}, \quad x^x, \quad x^{x^x}, \quad \ldots, \quad x\cdot \log 2\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-3372976bf092f58cb7da60d485b9e211_l3.png "Rendered by QuickLaTeX.com")
Nie musi to być jedna zmienna, może ich być więcej
![\[\sqrt{x^2 +y^2}, \quad \frac{x}{\sqrt[x]{1+xy}}\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-db0b871f0a40b54a9ead757933164e86_l3.png "Rendered by QuickLaTeX.com")
Jak równie dobrze może ich wcale nie być
![\[0 , \quad 7\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-08bb0be83748b5c959a78cbbf2b0bc39_l3.png "Rendered by QuickLaTeX.com")
Dla kontrastu przykłady, które nie są wyrażeniami algebraicznymi.
![\[\sin(x+y), \qquad \log x, \qquad +:-4, \qquad )\cdot 4 -(\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-5800fa55d3ddcb0aec2140486d37fb40_l3.png "Rendered by QuickLaTeX.com")
Jednomian to wyrażenie algebraiczne pewnej szczególnej postaci, dokładniej to takiej.
![\[ a \cdot x^n,\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-869a3681bb0da296e747b104a5b5f233_l3.png "Rendered by QuickLaTeX.com")
gdzie  jest konkretną daną stałą liczbą.
jest konkretną daną stałą liczbą.  . Natomiast to czym jest
. Natomiast to czym jest  zależy już od konkretnego kontekstu.
zależy już od konkretnego kontekstu.
 nazywamy współczynnikiem jednomianu
nazywamy współczynnikiem jednomianu
 nazywamy stopniem jednomianu
nazywamy stopniem jednomianu
zmienną jednomianu
Oczywiście jednomian może mieć więcej niż jedną zmienną. Dla dwóch zmiennych będzie to wyglądać tak:
![\[ a \cdot x^ny^m\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-8715bca4e6d56b02d15e4a0a938a0363_l3.png "Rendered by QuickLaTeX.com")
Stopnie jednomianu jest wówczas suma wykładników przy zmiennych, czyli 
Zmiennych może być jeszcze więcej, jak tu:
![\[ a \cdot x_{1}^{n_1}x_{2}^{n_2}x_{3}^{n_3}\ldots x_{r}^{n_r}\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-5d3e23575e54869d3dd83f50eb1220a7_l3.png "Rendered by QuickLaTeX.com")
Stopniem takiego jednomianu będzie suma 
Trygonometria i Zmiany w Definicjach Funkcji Trygonometrycznych
Odnośniki do poprzednich odcinków Trygonometrii w Krzywym Zwierciadle.
Odcinek 1.
https://www.kowalskimateusz.pl/beda-zmiany-w-ksiazkach-trygonometria/
Odcinek 2.
https://www.kowalskimateusz.pl/matematyka-trygonometria-tego-w-szkole-ci-nie-powiedza/
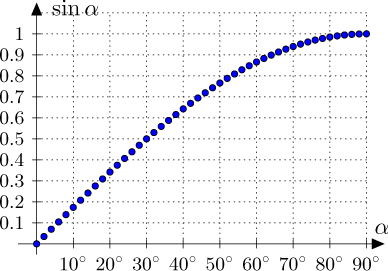
W tym nagraniu poznasz przejście pomiędzy trygonometria kąta ostrego i trygonometrią kąta rozwartego. Poznasz przy okazji kąt skierowany, który może być dodatni lub ujemny. Jest to zatem kąt dowolny.
Pojawią się wzory redukcyjne oraz podane zostaną definicje funkcji trygonometryczny kąta skierowanego w układzie współrzędnych



