Opowiem Ci dziś o reprezentacji spektralnej lub jak kto woli Twierdzeniu spektralnym.
Z tym, że ograniczę się dla prostoty tylko do macierzy.
Pokaże Ci specjalną własność na przykładzie, a potem uogólnimy na szersze przypadki.
PRZYKŁAD 1.
Weźmy macierz, dla której zachodzi warunek  . Macierz, która to spełnia nazywana jest to macierz normalną o współczynnikach rzeczywistych, ale do tego jeszcze dojdziemy. Masz zatem dla przykładu macierz
. Macierz, która to spełnia nazywana jest to macierz normalną o współczynnikach rzeczywistych, ale do tego jeszcze dojdziemy. Masz zatem dla przykładu macierz
![\mathbf{A}=\left[ \begin{matrix} 1 & 3 & 0 \\ 3 & -2 & -1 \\ 0 & -1 & 1 \\ \end{matrix} \right]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-2fef477924f695d9bfbd140dae253d41_l3.png "Rendered by QuickLaTeX.com")
Tak na marginesie to jest jeszcze szczególniejszy przypadek macierz normalnej rzeczywistej, gdyż jest to macierz symetryczna. Czyli

Wyliczasz wartości własne wychodzą takie  , można to oczywiście zapisać tak
, można to oczywiście zapisać tak  . Widać także, że każda lambda jest jednokrotna.
. Widać także, że każda lambda jest jednokrotna.
Obliczasz odpowiadające tym wartości własnym wektory własne o normie równej 1, czyli unormowane (bardzo ważne). A następnie dla tych wektorów odpowiadające projektory.
|
|
|
|
|
|
|
|
|
![{{\mathbf{V}}_{1}}=\left[ \begin{matrix} 1 \\ 0 \\ 3 \\ \end{matrix} \right]\frac{1}{\sqrt{10}}](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-e84047e31927c6ded1fc42feec2a24f6_l3.png "Rendered by QuickLaTeX.com")
![\[{{\mathbf{p}}_{1}}=\left[ \begin{matrix} 1 \\ 0 \\ 3 \\ \end{matrix} \right]\cdot \left[ \begin{matrix} 1 & 0 & 3 \\ \end{matrix} \right]\cdot \frac{1}{10}=\left[ \begin{matrix} 1 & 0 & 3 \\ 0 & 0 & 0 \\ 3 & 0 & 9 \\ \end{matrix} \right]\cdot \frac{1}{10}\]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-f0c32a1aafe61a59d73efcfd9186bb4f_l3.png "Rendered by QuickLaTeX.com")
![{{\mathbf{V}}_{2}}=\left[ \begin{matrix} 3 \\ 2 \\ -1 \\ \end{matrix} \right]\frac{1}{\sqrt{14}}](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-f1a4a6f641aacf83b532d4967935f318_l3.png "Rendered by QuickLaTeX.com")
![{{\mathbf{p}}_{2}}=\left[ \begin{matrix} 3 \\ 2 \\ -1 \\ \end{matrix} \right]\cdot \left[ \begin{matrix} 3 & 2 & -1 \\ \end{matrix} \right]\cdot \frac{1}{14}=\left[ \begin{matrix} 9 & 6 & -3 \\ 6 & 4 & -2 \\ -3 & -2 & 1 \\ \end{matrix} \right]\cdot \frac{1}{14}](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-6ef8b145a9368066810e44415bf5252c_l3.png "Rendered by QuickLaTeX.com")
![{{\mathbf{V}}_{3}}=\left[ \begin{matrix} -3 \\ 5 \\ 1 \\ \end{matrix} \right]\frac{1}{\sqrt{35}}](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-316a9c68f447eeb56da4a2f1fbce7601_l3.png "Rendered by QuickLaTeX.com")
![{{\mathbf{p}}_{2}}=\left[ \begin{matrix} -3 \\ 5 \\ 1 \\ \end{matrix} \right]\cdot \left[ \begin{matrix} -3 & 5 & 1 \\ \end{matrix} \right]\cdot \frac{1}{35}=\left[ \begin{matrix} 9 & -15 & -3 \\ -15 & 25 & 5 \\ -3 & 5 & 1 \\ \end{matrix} \right]\cdot \frac{1}{35}](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-d7470b741e5b01832a0181740ea97221_l3.png "Rendered by QuickLaTeX.com")
To co chcę Ci pokazać to że zajdzie taka równość: Continue reading
![\[ \boxed{e^{it}=\cos t + i \sin t} \]](https://www.kowalskimateusz.pl/wp-content/ql-cache/quicklatex.com-6a782e24773ed484a09fc480d41c8c6b_l3.png "Rendered by QuickLaTeX.com")









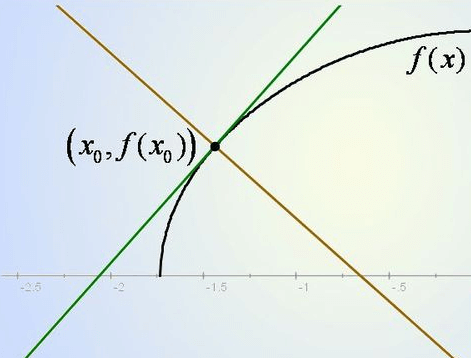
 opisujący wielkość skrzywienia krzywej.
opisujący wielkość skrzywienia krzywej. .
.

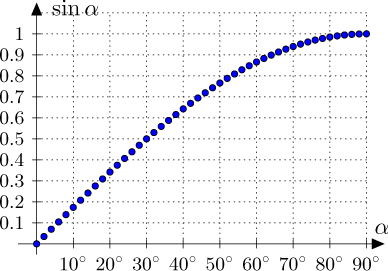
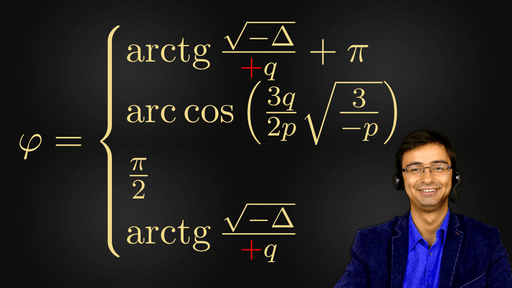
 . No przy tej okazji uznałem, że dobrze było by coś konkretnego napisać. Napisałem zbiór wzorów funkcji odwrotnych do trygonometrycznych. Takie wzory trudno znaleźć z odpowiednimi założeniami. Tak czy inaczej, zachęcam do rzucenia okiem. Wzbogacone o ładne wykresy.
. No przy tej okazji uznałem, że dobrze było by coś konkretnego napisać. Napisałem zbiór wzorów funkcji odwrotnych do trygonometrycznych. Takie wzory trudno znaleźć z odpowiednimi założeniami. Tak czy inaczej, zachęcam do rzucenia okiem. Wzbogacone o ładne wykresy.")

 i
i






